После удачного облета крыла S800, решил провести настройку дрона Rocket200. После соревнований, по горячим следам я поправил настройки камеры и хотел проверить работу на Taranis LUA скрипта для отображения и настройки PID. Очень удобно это делать в поле.
Камера показывает хорошо, может быть для темноты можно и чуть осветлить, но Днем все контрастно и четко.

В темноте сильно дает о себе знать цветной шум, Можно будет уменьшить насыщенность.
Уровень черного оптимальный. Сильнее не надо, и осветлять — при повышении яркости в очках появится белесая картинка. Ние кадр, я стою у машины, а точка- это огонек светодиода выбора антенны в Диверсити. Очень яркий оказался и летая вокруг я себя быстро находил.

PID настраивал с обнуления I и D и понижением P в половину от дефолта. По мере полета повышал. Заодно чуть поменял RC Rate и Super Rate. Конечно в темноте было не удобно летать, низко не получается, а высоко- нет ориентира. В основном около себя разворачивался и рулил. Это было опасно. По I я остался не доволен, при прогазовке рывками — нос чуть гуляет по PITCH.
Ниже картинка что получилось- вверху Дефолт, ниже что я накрутил в потемках.
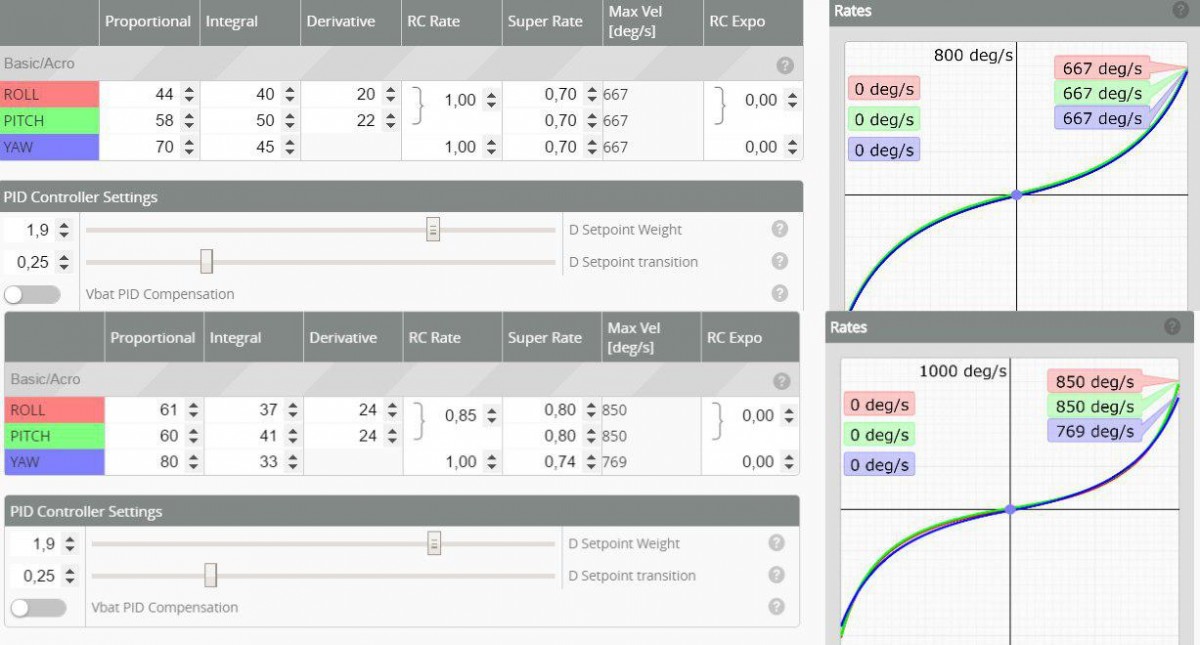
По видео с DVR первому и последнему разницу можно увидеть, разворот резкий получается более четким, но реакция на газ изза I слегка мешает.