Находясь в карантине сложно усидеть, а делать что то хочется. Беспокойный ручки снова нашли чем заняться — переполошить дроны на
Метка: PUDA

Удачный день для полетов, опробовал несколько локаций
Приглашали меня снять на видео с дрона поле для организации. Вот что из этого вышло. Само поле и комбайн в
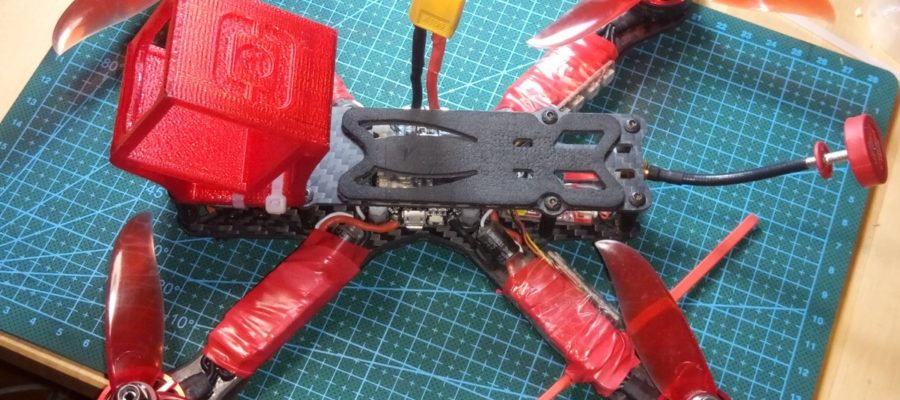
Puda D240 -модификация для Long Range
Рама, за последние пару месяцев, является основной при полетах, на ней удобно крепить видеокамеру HD и по управляемости она мне

Puda D240- переход на Butterflight
Поскольку FKF не включили в релиз Betaflight, а выпустили отдельный конфигуратор и очередной форк- Butterflight (http://butterflight.co/) Пока саму прошивку следует скачивать

Puda D240 Настройка и тест Betaflight 3.3.0 с фильтрами Кальмана
После сборки о первых облетов новой рамы PUDA 240- клона Xhover Stingy, получил не удовлетворительный результат. На полетном контроллере Matek

Открыл сезон 2018 на PUDA Stingy 240
В новогодние праздники погода выдалась теплая и выбрал время чтобы облетать PUDA Stingy 240 и заодно протестировать Foxeer BOX. Темнее рано и

Сборка клона ХHover Stingy — PUDA D240
После гоночных рам, давно уже хотел собрать раму для фристайла. Отличает их то, что центр масс у них лежит точно